Her ay milyonlarca bilimsever, Evrim Ağacı olarak karmaşık bilimsel
konuları basitçe anlatmamızdan ve ülkemizde bilim anlatıcılığını geliştirmeye yönelik
yaptığımız
kapsamlı çalışmalarımızdan faydalanıyor. Bütçenize zarar vermeden, aylık veya tek seferlik
sadece 39₺ gibi miktarlarda bize destek olarak bu çabalarımızı destekleyebilir, Türkiye'de
bilim
okuryazarlığını güçlendirmemize katkı sağlayabilirsiniz.
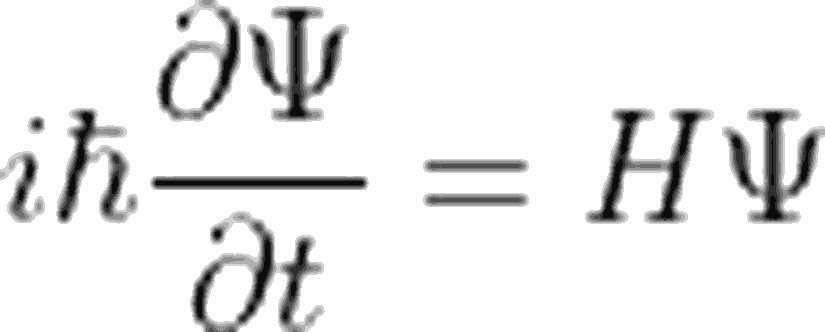
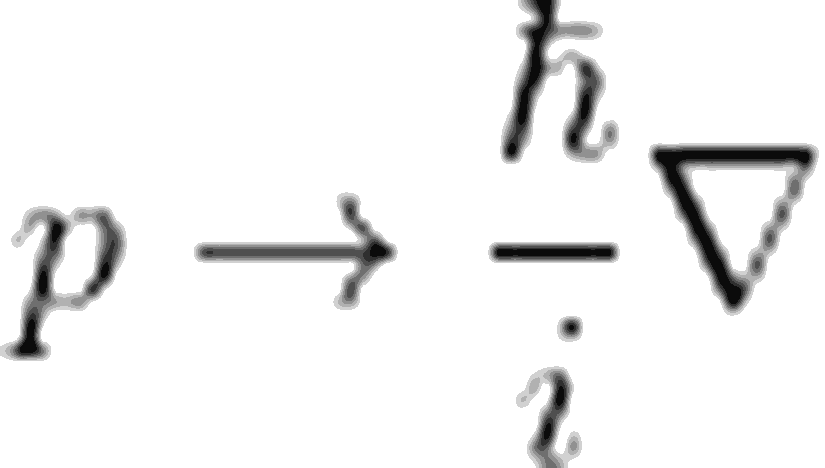
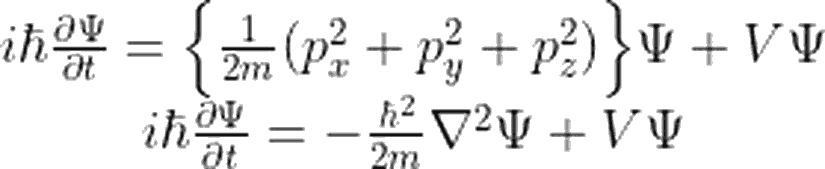
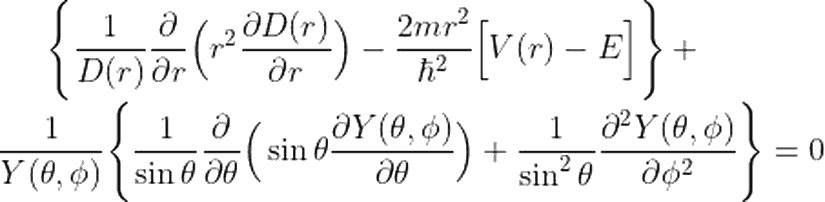
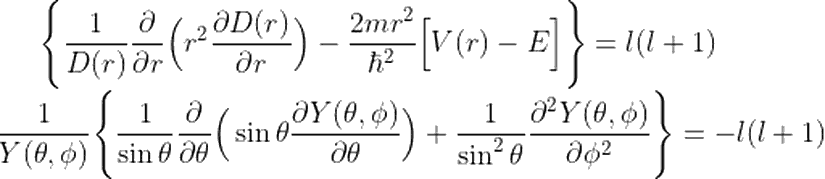
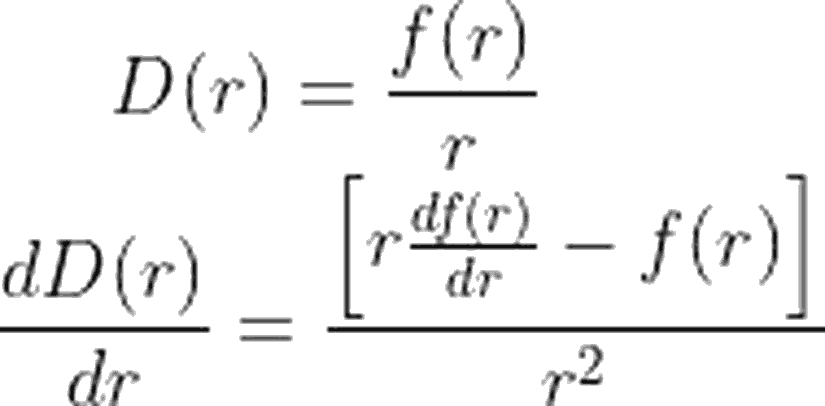
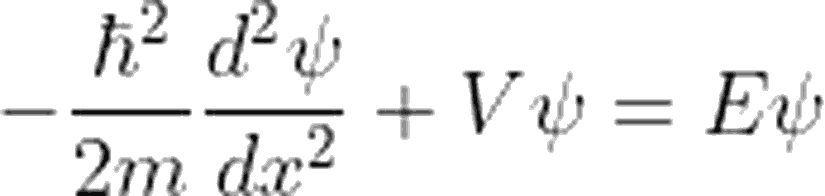
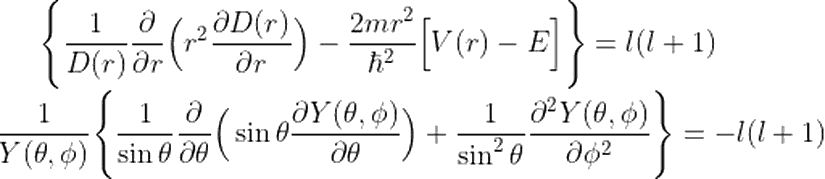
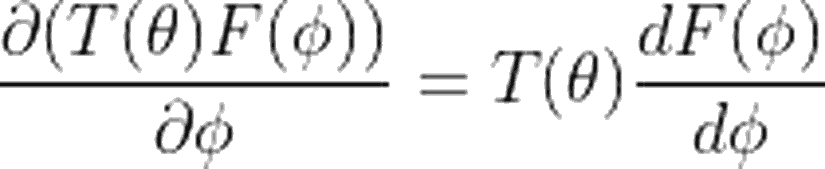
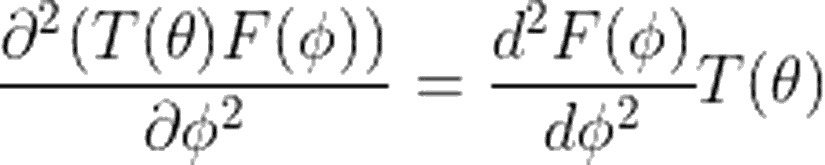
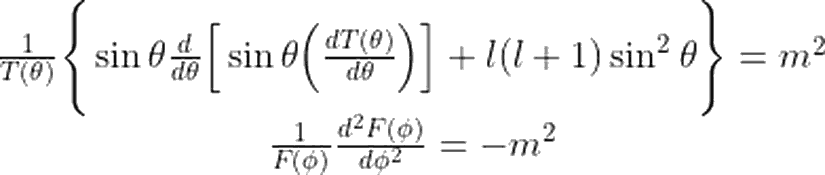
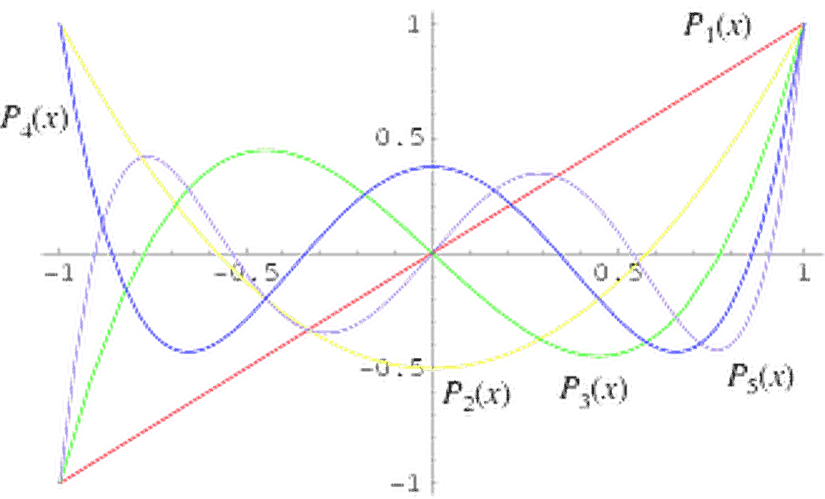
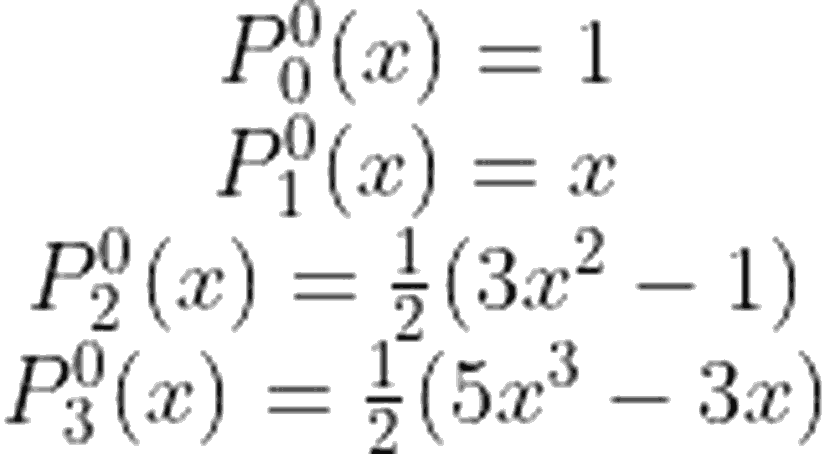
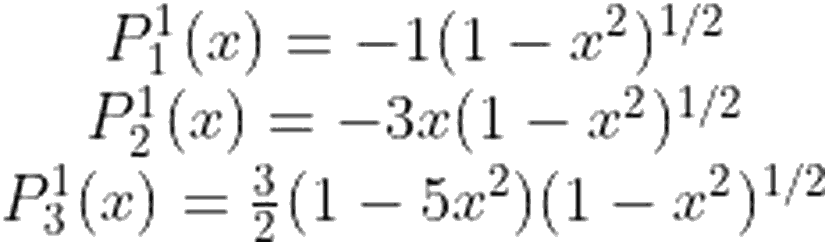
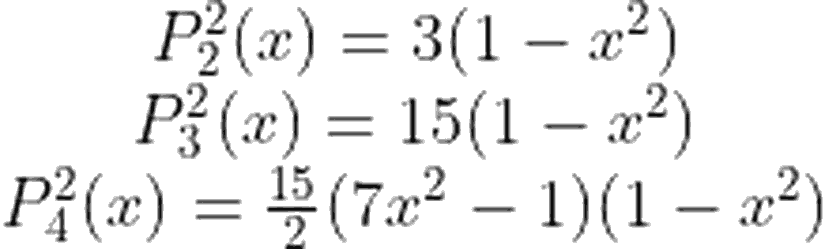
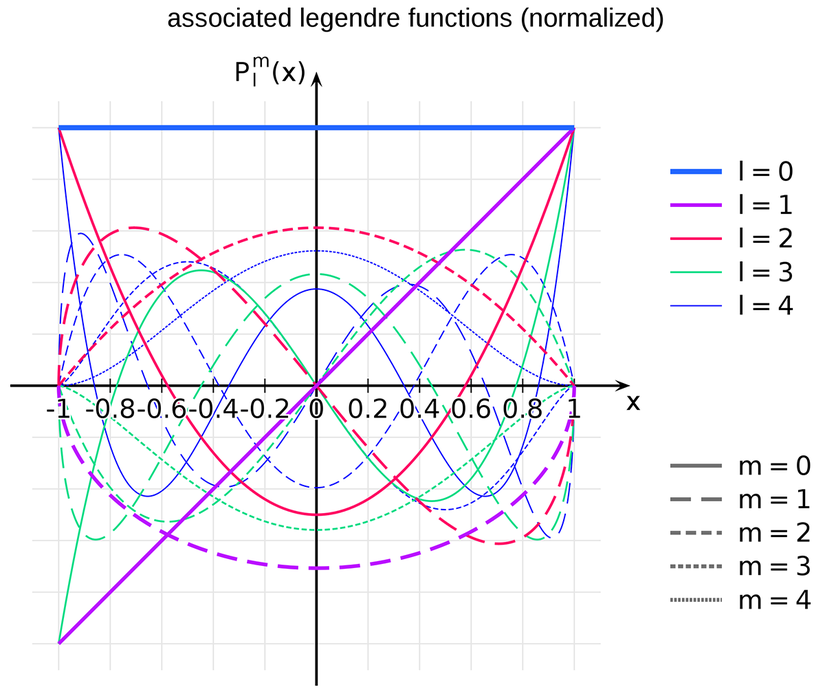
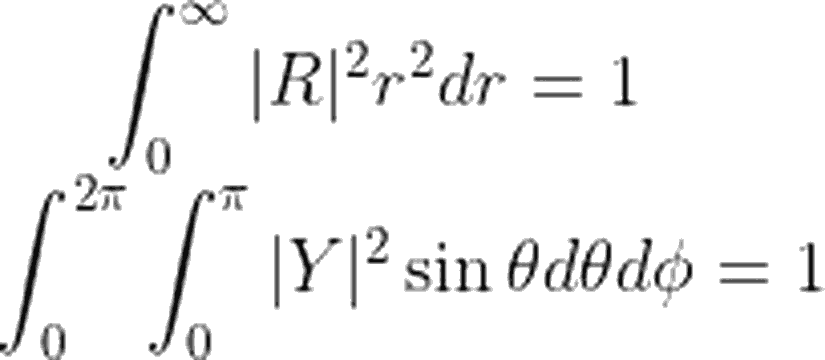
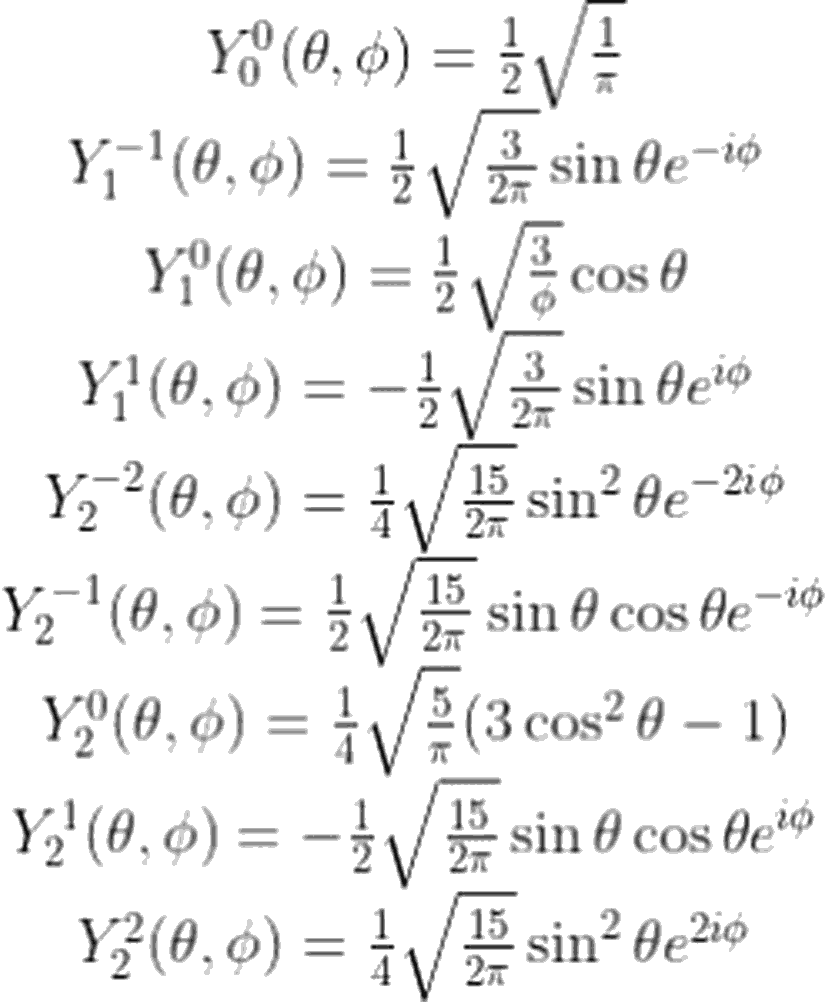
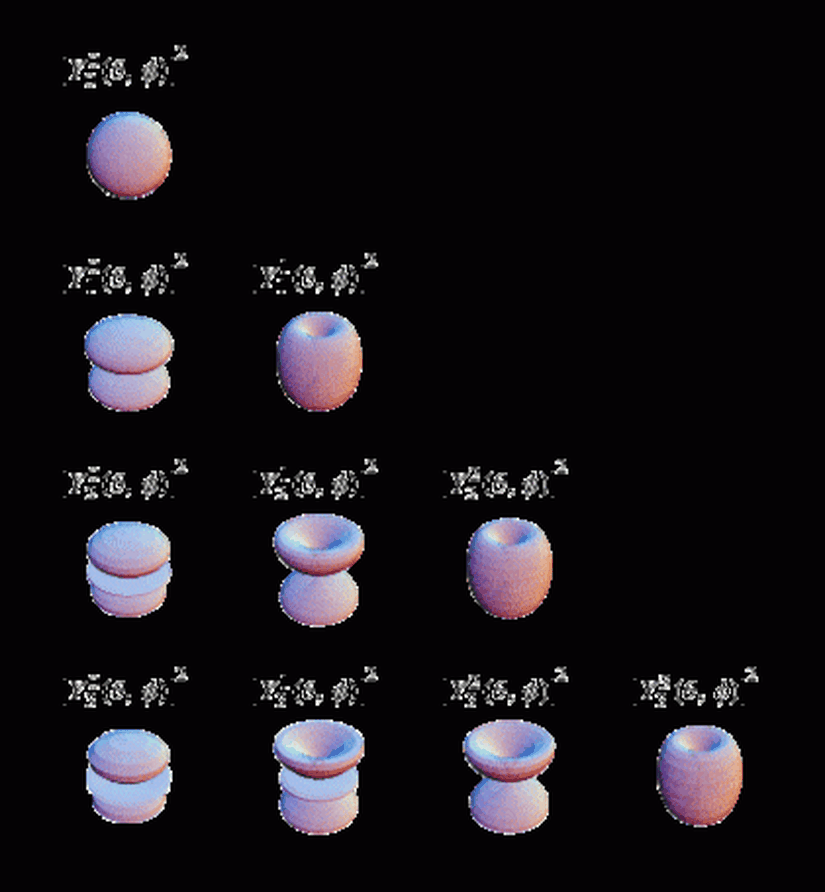
Eğer incelemek istediğimiz fiziksel sistemin potansiyeli küresel simetrik bir dağılıma sahipse, Schrödinger Denklemi'ni küresel koordinatlarda çalışmak oldukça pratik olacaktır. (Bkz. Küresel koordinatlar) Çözümler sırasında bütün diferansiyel denklemlerin detaylarına girmeyeceğim, fakat bunların çözümlerinin getirdiği sonuçlar kesinlikle dikkat çekici olacaktır. Bu yüzden sonucun neden böyle çıktığını daha iyi anlamak adına bu tipteki diferansiyellerin çözümüne olabildiğince değinmeye çalıştım. Fakat elbette tümünü bir başlık altında çözmemiz mümkün değil, bu sebeple bir kısmını sizin ilginize bırakıyorum. Yazının sonunda kuantum sayıları olan l ve m nin küresel koordinatlarda schrödinger denklemi çözümü sırasında nasıl elde edildiğini göreceğiz. Schrödinger Denklemi; Denklem 1Klasik mekanikte kinetik enerji ile potansiyel enerjinin toplamını ifade eden Hamiltonyen operatörü olarak gösterdiğimiz H'ı aşağıdaki şekilde açabiliriz. Denklem 2Burada olmak üzere, aşağıdaki şekilde ayrı ayrı yazılabilir. Denklem 3Eğer buradaki p ifadesinin karesini alacak olursak, Denklem 4Şimdi elimizdekileri (1) no'lu Schrödinger denkleminde yerleştirmeye başlayabiliriz. Öncelikle (2) no'lu denklem ile verilen Hamiltonyen operatörünü (1) no'lu Schrödinger denkleminde yerine yazalım. Denklem 5Böylelikle potansiyel enerji (V) ve dalga fonksiyonu ; konumun r ve zamanın t bir fonksiyonu olarak ifade edilir. Klasik mekanikten biliyoruz ki x(t) ifade edilebiliyorsa; konumun değişiminden hızı, hızın değişiminden ivmeyi, hız ile kütleden kinetik enerjiyi, yine hızı ve kütleyi kullanarak momentumu ifade edebiliriz. Bu yüzden amacımız dalga fonksiyonunu çözmek. Eğer potansiyel V zamandan bağımsızsa ₙ zamandan bağımsız Schrödinger denklemini sağlayacak şekilde Denklem 6yazılır. Böylelikle Denklem 7sağlanır. Zamana bağımlı Schrödinger denkleminin çözümü ise c_n sabitler olmak üzere Denklem 8şeklinde ifade edilir. Potansiyel, yalnızca orijinden olan uzaklığın bir fonksiyonu olduğundan küresel koordinatları seçmek işleri kolaylaştıracaktır. Çünkü küresel simetrik bir yapıda merkezden orijine olan koordinatlardaki değişimi kartezyen koordinat sisteminde (x,y,z)'nin tümüyle, küresel koordinatlarda ise (r,Θ,Φ)'den yalnızca r'ye bağlı olarak ele almak mümkündür. Bunu yapmak için öncelikle 7 no'lu denklemde ∇² ifadesi yerine küresel koordinatlardaki Laplace operatörünü yazmalıyız. Küresel koordinatlarda Laplace operatörü Denklem 9olarak verildiğinden (9) no'lu denklemi (7) no'lu denklemde yerine yazarsak Denklem 10Denklem bir hayli karışık görünüyor. Fakat elimizde mantıksal olarak kategorilendirilebilecek gibi duran değişkenler var. Bu yüzden değişkenlere ayırma metodunu kullanarak (r,Θ,Φ)'yi dikine D ve açısal Y bileşenler cinsinden yazabiliriz. Denklem 11Şimdi (11) no'lu denklemi, (10) no'lu denklemde yerine yazabiliriz. Burada yaptığımız tek şey \psi fonksiyonunu iki ayrı parçaya ayırmak oldu. (10) no'lu denklemde ilgili türevlerin olduğu yere ilgili parçaların geldiğine dikkat edin. Örneğin ilk parçada dD(r)/dr geliyor, bu aslında d(D(r)Y(Θ,Φ))/dr'dir. Fakat Y(Θ,Φ) parçası r'ye bağlı olmadığından bu kısımdan bir etki gelmez. Uygun şekilde düzenleyip yazarsak Denklem 12Karmaşık görünen bu denklemi bir iki matematik hareketiyle ihtişamlı görüntüsüne kavuşturabiliriz. Öncelikle ile çarparsak Denklem 13Şimdi de son bir hamle olarak D(r)Y(Θ,Φ) ile bölelim Denlem 14Böylelikle denklemimiz tamamen değişkenlerine ayrılmış oldu. Denklemin bazı parçaları yalnızca r'ye bağlı iken, geri kalanlar da yalnızca Θve Φ'ye bağlı. Daha anlaşılır şekilde düzenlersek Denklem 15Bu son durumda üst tarafın yalnızca r'nin, alt tarafın ise yalnızca Θve Φ'nin bir fonksiyonu olduğuna dikkat edin. İki farklı parametreye ait parçaların toplamı sıfıra eşit olduğuna göre, bu parçalar birbirinin zıt işaretlisi olan iki sabite eşittir. Bu sabite x gibi herhangi bir sayı değeri atamak yerine l(l+1) diyeceğiz. Bunun sebebi çözümü getiren Legendre polinomlarıdır. Elbette biz sonucun ne olduğunu bildiğimiz için böyle bir yol izliyoruz, çözümü yeniden keşfetmediğimizi unutmayın. Direkt doğru yöntemi uygulayarak sonuca ulaşıyoruz. O yüzden kafanız "Nasıl da bunun geleceğini bildiler?" diyerek karışmasın. Bu şekilde yeniden düzenlersek Denklem 16Böylelikle denklemimizi istediğimiz şekilde düzenlemiş olduk. Bundan sonra yapmamız gereken bu iki ayrı parçayı matematiksel metotlar izleyerek çözmek. Öncelikle üstteki denklem parçacığı ile başlayalım. Bu kısım yalnızca r'ye bağlı olduğundan dikine (radyal) parçadır. Çözümü yapmak için öncelikle f(r)=rD(r) şeklinde bir fonksiyon tanımlamamız gerekiyor. Böylesi bir fonksiyonu, denklemdeki parçalarını elde ederek yerine koyduğumuzda istediğimiz tipte bir denkleme ulaşacağız. Öncelikle (16) no'lu denklemde üstte yer alan dikine (radyal) ifadeyi, D(r) ile çarpıyoruz. Denklem 17Denklemin sağındaki sabit terim yerine D(r) ifadesini ekleyerek işleri biraz karmaşıklaştırmışız gibi görünebilir, fakat amacımız denklemin başındaki türev ifadesini yalın hale getirmekti. Şimdi tanımladığımız f(r) fonksiyonu üzerinden türev alıp, bu ifadede yerine yazabiliriz. Denklem 18Bu durumda denklemde yer alan aşağıdaki ifade f(r) cinsinden Denklem 19şekline gelir. Şimdi bunu (17) no'lu denklemde yerine yazarak Denklem 20Burada 1/r ifadesi biraz rahatsız edici duruyor. Bu yüzden denklemi r ile çarpıyoruz. Denklem 21Şimdi denklemimiz çok daha sade bir görüntüye kavuştu. Son bir hamleyle tek boyuttaki Schrödinger denklemine benzetmemiz mümkün görünüyor. Tek boyutta Schrödinger denklemi aşağıdaki şekilde veriliyordu. Denklem 22(21) no'lu denklemi ile çarparsak, denklemin ilk ifadesini benzetmiş oluruz. Denklem 23 Şimdi yapmamız gereken denklemin sağ tarafındaki ifadeyi sola geçirip, E ifadesini de sağa geçirmek Denklem 24Böylelikle elde ettiğimiz denklem şekil olarak (22) no'lu tek boyuttaki Schrödinger denklemiyle aynıdır. (22) no'lu denklemle kıyasladığımız zaman büyük parantez içerisinde kalan ifadenin aslında tamamının potansiyel olduğunu görürüz. Burada potansiyel V'ye ek olarak verilen potansiyel terimine; klasik mekanikte, parçacığı merkezden dışarı doğru itme etkisi gösteren merkezkaç etkisi gibi bir etki gösterdiği için merkezkaç potansiyeli denir. Bu noktadan sonrası için V(r) potansiyelinin bilinmesi gerektiğinden burada bırakıyoruz. Sırada (16) no'lu denklemimizde alt kısımda verilen Θve Φ'ye bağlı açısal kısım var. Bu kısmın sonucunu matematiksel olarak daha etkileyici bulduğumdan sona bırakmak istedim. Kolayca görebilmek adına (16) no'lu denklemi tekrar yazalım. Denklem 25Artık alttaki denklem ile ilgileniyoruz. Bu denklemi Y(Θ,Φ)\sin²(Θ) ile çarparsak Denklem 26Şimdi yine, daha önce yaptığımız gibi değişkenlere ayırma metodunu izleyeceğiz. Y(Θ,Φ) fonksiyonu Θ ve Φ'nin fonksiyonları olarak ayrı ayrı yazılabilir. Denlem 27Burada kolayca anlaşılsın diye Θ (teta) için T harfini, Φ (fi) için de F harfini seçtim. Karmaşık sembollerle donatmak yerine, böyle okumanın daha kolay olacağını düşünüyorum. Elbette siz istediğiniz bir harfi veya sembolü atayabilirsiniz. (27) no'lu ifadeyi (26)'da yerine yazalım Denklem 28İçeride yer alan türevleri aşağıdaki şekilde çözebiliriz. Denklem 29Sağdaki ifade yalnızca Φ'ye bağlı bir fonksiyonun Θ'ya göre değişimi 0 olacağından gider. Böylece denklem parçası Denklem 30halini alır. Bunu yerine koymadan önce ilgilenenmeniz gereken diğer denklem parçası var. Denklem 31Eşitliğin solda kalan parçası yalnızca Θ'ya bağlı fonksiyonun Φ'ye göre değişimi 0 olduğundan gider. Denklem 32Bir kez daha bu ifadenin Φ'ye göre değişimini alırsak Denklem 33Yine aynı sebepten denklem parçası sadeleşerek aşağıdaki şekilde düzenlenebilir. Denklem 34(30) ve (34) no'lu denklemler (28) no'lu denklemde yerine yazılırsa Denklem 35Eşitliği T(Θ)F(Φ) ile bölüp, sağdaki ifadeyi de sola alırsak denklem Denklem 36şeklini alır. Böylelikle denklemin ilk terimi yalnızca Θ, ikinci terimi ise yalnızca Φ cinsinden yazılarak denklem değişkenlerine ayrıştırılmış oldu. Yine daha önceki sebeplerimizden ötürü bu sefer bir tarafı m²'ye diğer tarafı -m²'ye eşitleyeceğiz. Denklem 37Alttaki diferansiyel denklemin çözümü oldukça kolaydır. Denklem 38Bu tipteki bir denklemde şeklinde bir çözüm olduğunu varsayalım. Bu durumda denklem Denklem 40Buradaki türev ifadesini aşağıdaki şekilde açıp yerine yazalım. Denklem 41Burada olacaktır. Bu durumda parantez içerisindeki ifadenin sıfır olması gerekir. Bu eşitliğin çözümü Denklem 42olarak karşımıza çıkar. Bu durumda yalnızca Φ'ye bağımlı fonksiyonumuz Denklem 43şeklinde yazılabilir. Burada negatif olan çözümün nereye gittiğini sorabilirsiniz. Burayı pozitif alarak m'nin negatif değerleri için bu koşulu da sağladığımıza dikkat edin. Böylelikle m hem negatif hem pozitif olabilir. Aslında buradaki çözüm tam olarak şeklindedir. Buradaki c₁ herhangi bir katsayıdır, bunu fonksiyonumuza dahil ederek yazmadık. Küresel koordinatlarda Φ'yi 2π kadar artırdığımızda aynı noktaya geri döndüğümüze göre Denklem 44yazabiliriz. Bunu alıp (42) no'lu denklemde yerine yazarsak Denklem 45Ve şimşeklerin çaktığı an! Böylesi bir eşitliğin sağlanabilmesi için olmalıdır ve bu ancak m'nin aşağıdaki değerleri için mümkündür. Şimdi Θ denklemine dönebiliriz. Bu tipteki diferansiyel denklemin çözümü diğeri kadar kolay değildir. Çözüm birleşik (assosiye) Legendre fonksiyonu olmak üzere olarak verilir. Birleşik Legendre fonksiyonu ise aşağıdaki şekilde tanımlanır. Burada verilen Pₗ(x) l-inci Legendre polinomudur. n-inci derecen bir Legendre polinomu Rodrigues formülü ile aşağıdaki şekilde tanımlanır. İlk birkaç Legendre polinomu aşağıdaki şekildedir. İlk birkaç legendre polinomunun grafik gösterimiLegendre polinomlarını bildiğimize göre birleşik (assosiye) legendre fonksiyonlarını da bulabiliriz. Burada m=0 için olduğuna dikkat edin. Bu durumda ilk birkaç birleşik legendre fonksiyonu aşağıdaki şekilde verilebilir. (Fonksiyon ile polinom arasındaki farka dikkat edin!) m=0 ve l=0,1,2,3 değerleri için m=1 ve l=1,2,3 değerleri için m=2 ve l=2,3,4 değerleri için Burada dikkatinizi bir şeyin çekmiş olması gerekiyor. Daima |m|≤l koşulundaki sonuçlardan bahsettik. Bunun sebebi |m|>l durumunda (d/dx)'in mertebesinin, önüne geldiği l-inci Legendre polinomunu sıfır yapmasıdır. Böylesine bir durum için m'nin alabileceği (2l+1) tane değer vardır. Bu değerler m=-l, -l+1,...,-1,0,1,...,l-1,l aralığındadır. (l=0,1,2,3,...) olmak üzere. İlk birkaç birleşik (assosiye) legendre fonksiyonuŞimdi normalizasyon işlemini uygulayabiliriz. Hacim elemanı üzerinden integral alacak olursak Bunları ayrı ayrı da normlayabileceğimiz açıktır. Normlanmış açısal dalga fonksiyonlarının matematiksel çok özel bir karşılığı vardır ve fizikte sıklıkla karşımıza çıkar. Bunlara küresel harmonikler diyoruz. Aşağıdaki şekilde tanımlanır. Buradaki ε aşağıdaki aşağıdaki ilk birkaç küresel harmonikte de deneyimleyeceğiniz üzere m≥ 0 için , m≤ 0 için ise ε=1 koşulunu sağlar. İlk birkaç küresel harmonik Bazı 'lerin grafik gösterimi İşte burada gördüğümüz l açısal momentum kuantum sayısını (ya da azimutal kuantum sayısını), m de manyetik kuantum sayısını ifade eder. Böylelikle lisede görüp de nereden geldiğine pek de anlam veremediğimiz bu iki kuantum sayısı bu şekilde elde edilir. Ögetay Kayalı Kaynaklar 1. Kuantum Mekaniğine Giriş - II Ders Notları - Cemal Parlak - Ege Üniversitesi 2. Kuantum Mekaniğine Giriş - David J. Griffiths - Çeviri: Haluk Özbek, Sondan Durukanoğlu Feyiz 3. http://www.rpi.edu/dept/phys/Courses/phys410/lct4.pdf 4. http://hyperphysics.phy-astr.gsu.edu/hbase/quantum/sch3d.html 5. http://mathworld.wolfram.com/LegendrePolynomial.html 6. http://hyperphysics.phy-astr.gsu.edu/hbase/math/legend.html 7. http://mathworld.wolfram.com/AssociatedLegendrePolynomial.html 8. http://mathworld.wolfram.com/SphericalHarmonic.html
Bu Makaleyi Alıntıla
Okundu Olarak İşaretle
0
0
Paylaş
Alıntıla
Alıntıları Göster
Paylaş
Sonra Oku
Notlarım
Yazdır / PDF Olarak Kaydet
Bize Ulaş
Yukarı Zıpla
İçeriklerimizin bilimsel gerçekleri doğru bir şekilde yansıtması için en üst düzey çabayı
gösteriyoruz. Gözünüze doğru gelmeyen bir şey varsa, mümkünse güvenilir kaynaklarınızla
birlikte bize ulaşın!
Bu içeriğimizle ilgili bir sorunuz mu var?
Buraya tıklayarak
sorabilirsiniz.
Evrim Ağacı'na her ay sadece 1 kahve ısmarlayarak destek olmak ister misiniz?
Şu iki siteden birini kullanarak şimdi destek olabilirsiniz:
kreosus.com/evrimagaci | patreon.com/evrimagaci
Çıktı Bilgisi: Bu sayfa, Evrim Ağacı yazdırma aracı
kullanılarak 17/04/2024 00:45:14 tarihinde oluşturulmuştur. Evrim
Ağacı'ndaki içeriklerin tamamı, birden fazla editör tarafından, durmaksızın elden
geçirilmekte, güncellenmekte ve geliştirilmektedir. Dolayısıyla bu çıktının alındığı
tarihten sonra yapılan güncellemeleri görmek ve bu içeriğin en güncel halini okumak
için lütfen şu adrese gidiniz: https://evrimagaci.org/s/12599
İçerik Kullanım İzinleri: Evrim Ağacı'ndaki yazılı içerikler
orijinallerine hiçbir şekilde dokunulmadığı müddetçe izin
alınmaksızın
paylaşılabilir, kopyalanabilir, yapıştırılabilir, çoğaltılabilir, basılabilir,
dağıtılabilir, yayılabilir, alıntılanabilir. Ancak bu içeriklerin hiçbiri izin
alınmaksızın değiştirilemez ve değiştirilmiş halleri Evrim Ağacı'na aitmiş gibi
sunulamaz. Benzer şekilde, içeriklerin hiçbiri, söz konusu içeriğin açıkça
belirtilmiş yazarlarından ve Evrim Ağacı'ndan başkasına aitmiş gibi sunulamaz. Bu
sayfa izin alınmaksızın düzenlenemez, Evrim Ağacı logosu, yazar/editör bilgileri ve
içeriğin diğer kısımları izin alınmaksızın değiştirilemez veya kaldırılamaz.
Bugün Türkiye'de bilime ve bilim okuryazarlığına neler katacaksın?
Bağlantı
Kurallar
Komünite Kuralları
Bu komünite, aklınızdan geçen düşünceleri Evrim Ağacı ailesiyle paylaşabilmeniz içindir. Yapacağınız paylaşımlar Evrim Ağacı'nın kurallarına tabidir. Ayrıca bu komünitenin ek kurallarına da uymanız gerekmektedir.
1
Bilim kimliğinizi önceleyin.
Evrim Ağacı bir bilim platformudur. Dolayısıyla aklınızdan geçen her şeyden ziyade, bilim veya yaşamla ilgili olabilecek düşüncelerinizle ilgileniyoruz.
2
Propaganda ve baskı amaçlı kullanmayın.
Herkesin aklından her şey geçebilir; fakat bu platformun amacı, insanların belli ideolojiler için propaganda yapmaları veya başkaları üzerinde baskı kurma amacıyla geliştirilmemiştir. Paylaştığınız fikirlerin değer kattığından emin olun.
Değer katın; hassas konulardan ve öznel yoruma açık alanlardan uzak durun.
Bu komünitenin amacı okurlara hayatla ilgili keyifli farkındalıklar yaşatabilmektir. Din, politika, spor, aktüel konular gibi anlık tepkilere neden olabilecek konulardaki tespitlerden kaçının. Ayrıca aklınızdan geçenlerin Türkiye’deki bilim komünitesine değer katması beklenmektedir.
5
Cevap hakkı doğurmayın.
Bu platformda cevap veya yorum sistemi bulunmamaktadır. Dolayısıyla aklınızdan geçenlerin, tespit edilebilir kişilere cevap hakkı doğurmadığından emin olun.
Evrim Ağacı'nın %100 okur destekli bir bilim platformu olduğunu biliyor muydunuz? Evrim
Ağacı'nın maddi destekçileri arasına katılarak Türkiye'de bilimin yayılmasına güç
katın.
Evrim Ağacı Akademi (ya da kısaca EA Akademi), 2010 yılından beri ürettiğimiz
makalelerden oluşan ve kendi kendinizi bilimin çeşitli dallarında eğitebileceğiniz bir
çevirim içi eğitim girişimi! Evrim Ağacı Akademi'yi
buraya tıklayarak görebilirsiniz. Daha
fazla bilgi için buraya tıklayın.
Etkinlik & İlan
Bilim ile ilgili bir etkinlik mi düzenliyorsunuz? Yoksa bilim insanlarını veya
bilimseverleri ilgilendiren bir iş, staj, çalıştay, makale çağrısı vb. bir duyurunuz mu
var?
Etkinlik & İlan Platformumuzda
paylaşın, milyonlarca bilimsevere ulaşsın.
Podcast
Evrim Ağacı'nın birçok içeriğinin profesyonel ses sanatçıları tarafından
seslendirildiğini
biliyor muydunuz? Bunların hepsini Podcast
Platformumuzda dinleyebilirsiniz. Ayrıca Spotify,
iTunes, Google Podcast ve YouTube bağlantılarını da bir arada bulabilirsiniz.
Evrim Ağacı tarafından otomatik olarak takip edilen işlemleri istediğin zaman
durdurabilirsin. [Site ayalarına git...]
Filtrele
Listele
Bu yazıdaki hareketlerin
Devamını Göster
Filtrele
Listele
Tüm Okuma Geçmişin
Devamını Göster
0/10000
Otomatik
Otomatik
26/12/2020, Perşembe
Düzenle
Sil
0/10000
Bu Makaleyi Alıntıla
Evrim Ağacı Formatı
APA7
MLA9
Chicago
Ö. Kayalı. Kuantum Mekaniği: Küresel Koordinatlarda Schrödinger Denklemi.
(9 Temmuz 2016).
Alındığı
Tarih: 17 Nisan 2024. Alındığı Yer:
https://evrimagaci.org/s/12599
Kayalı, Ö. (2016, July 09).
Kuantum Mekaniği: Küresel Koordinatlarda Schrödinger Denklemi.
Evrim Ağacı. Retrieved April 17, 2024. from https://evrimagaci.org/s/12599
Ö. Kayalı. “Kuantum Mekaniği: Küresel Koordinatlarda Schrödinger Denklemi.” Edited
by Ögetay Kayalı. Evrim Ağacı, 09 Jul. 2016,
https://evrimagaci.org/s/12599.
Kayalı, Ögetay. “Kuantum Mekaniği: Küresel Koordinatlarda Schrödinger Denklemi.” Edited
by Ögetay Kayalı. Evrim
Ağacı, July 09, 2016. https://evrimagaci.org/s/12599.
Türkiye'de bilimin gelişimi için 2024'te de Evrim Ağacı'nı destekleyin!
Bu yıl sayfamızda gezdiniz.
2024 de Evrim Ağacı için yeniliklerle dolu bir yıl olacak. Türkiye'nin en güvenilir bilim platformunu daha da ileriye taşımak için sizin desteğinize ihtiyacımız var. Bu işi sadece bir hobi olarak yapmıyoruz; bu, bizim tek mesleğimiz ve yegâne görevimiz. Siz de 2024 yılında Evrim Ağacı'nın büyümesine ve gelişmesine katkıda bulunarak bu yolculuğun bir parçası olabilirsiniz. Tek seferlik destek olun veya daha iyisi, aylık destekçilerimiz
arasına şimdi katılın.
“
Gerçeği aramak, arzulananı aramak değildir.” Albert Camus
Bilim İçin 30 Saniyeniz Var mı?
Evrim Ağacı, tamamen okur ve izleyen desteğiyle sürdürülen, bağımsız bir bilim
oluşumu.
Ücretsiz bir Evrim Ağacı üyeliği oluşturmanın çok sayıda
avantajından
biri, sitedeki reklamları %50 oranında azaltmak (destekçilerimiz arasına katılarak
reklamların %100'ünü kapatabilirsiniz). Evrim Ağacı'nda geçirdiğiniz zamanı
zenginleştirmek için, sadece 30 saniyenizi ayırarak üye olun (üyeyseniz, giriş
yapmanızı tavsiye ederiz).






































 0
0
 0
0
 0
0
 0
0
 0
0
 0
0
 0
0
 0
0
 0
0
 0
0
 0
0
 0
0
